My Projects
Cascaded Integrator Comb Filter
Digital Integrated Circuit Design, Spring 2020
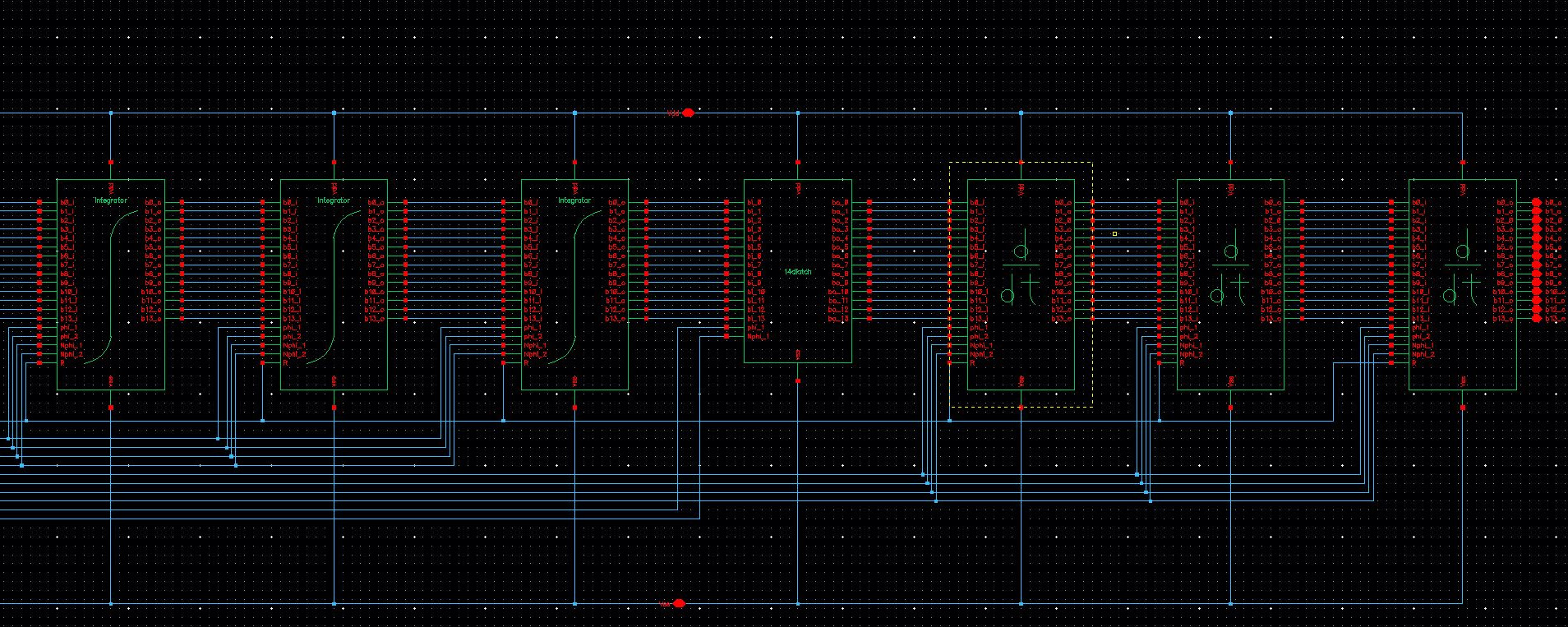
The filter design has 3 stages and a 5 bit input. 14 bits are input to an integrator. Three integrators will be cascaded together. These integrators operate at 10MHz. The output of the integrator stage will connect to a 14 bit D latch. The output of the D latch then connects to a 14 bit differentiator. This begins the comb stage where three differentiators are cascaded together.
Skills Gained: Proficiency with Cadence and Integrated Circuit Design.
Collision Detection Robot
Foundations of Robotics, Fall 2019
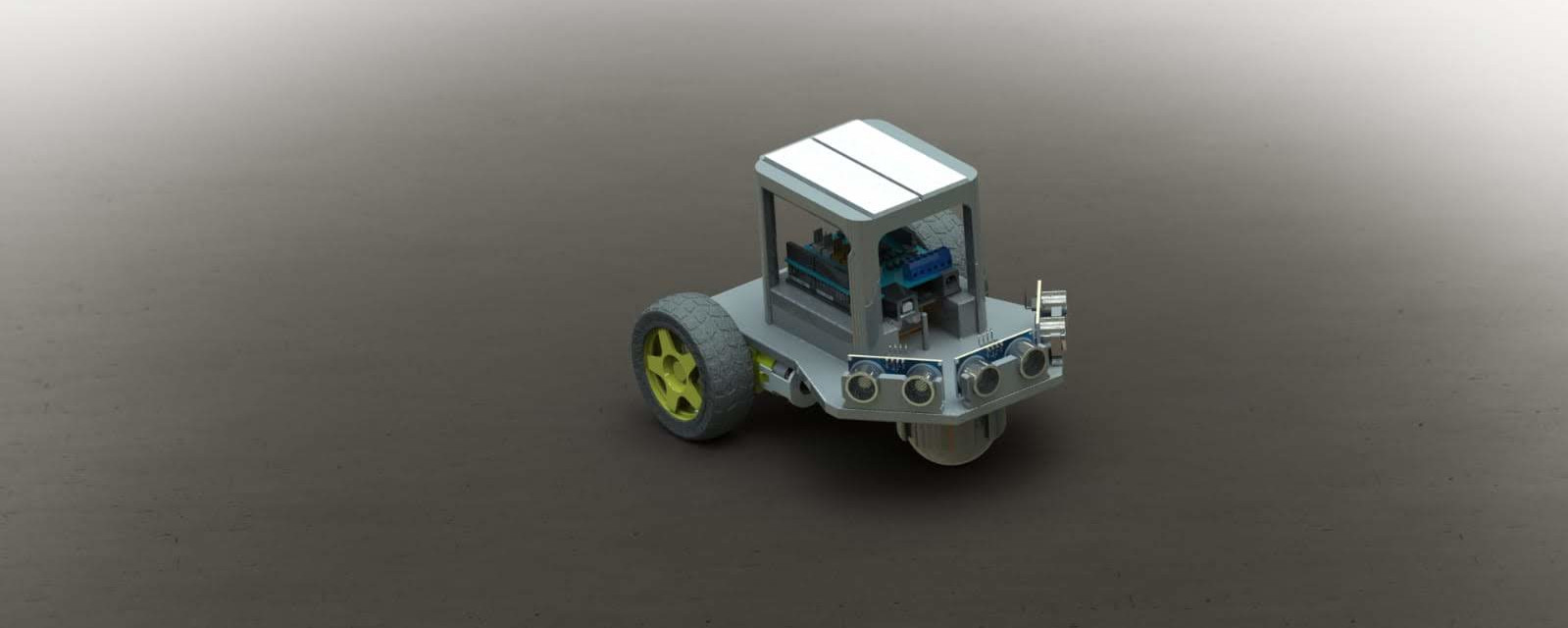
Using 3 ultrasonic sensors, 2 servo motors, an arduino and a motor shield the robot was born. The chassis of the robot was 3D printed so that the senors would fit nicely and that we could keep the wires contained. The front wheel was a press fit sphere that needed a lot of sanding but worked well. The goal was to create a robot similar to a roomba.
Skills Gained: Using a closed loop system to develope an AI which avoids objects with some randomization in its movement.
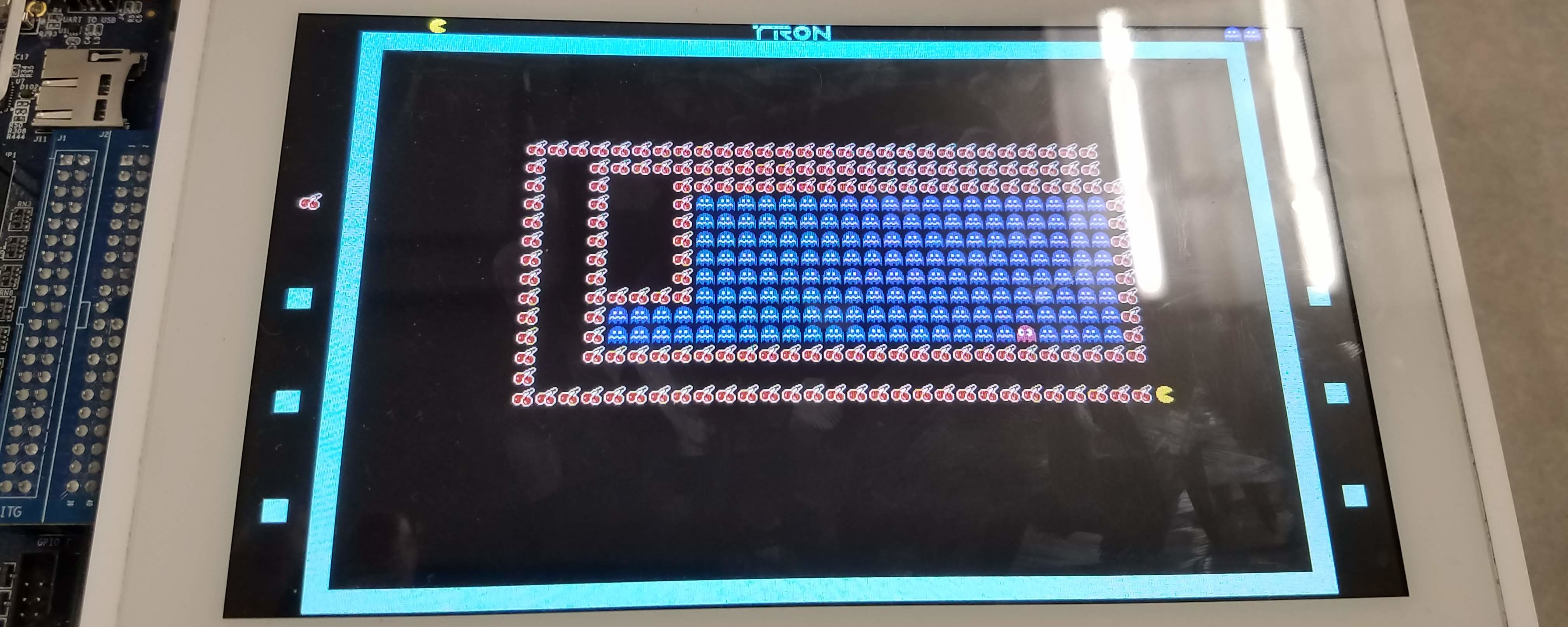
VHDL TRON Game
FPGAs, Spring 2019
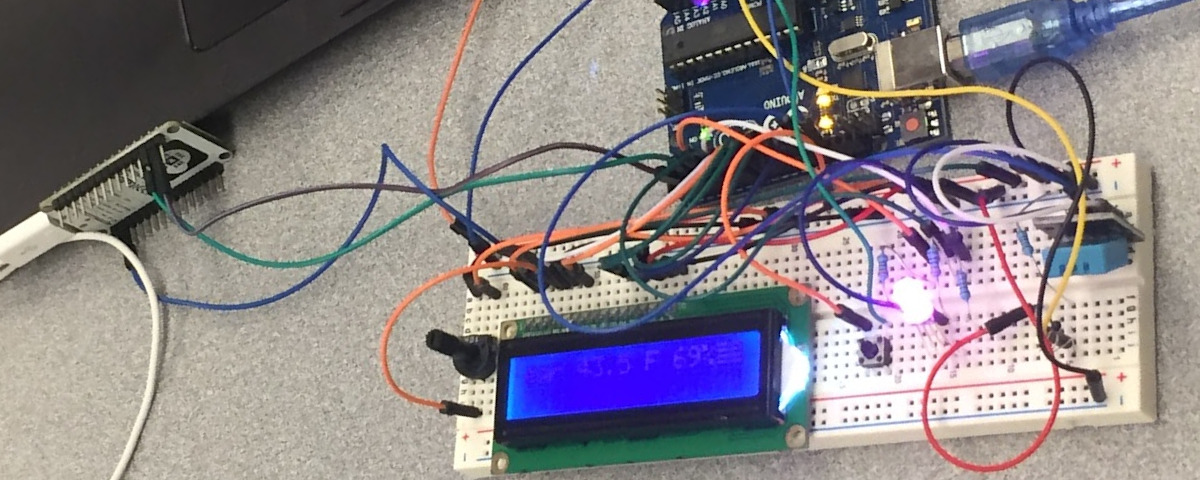
Weather API
Micro Processors, Spring 2018
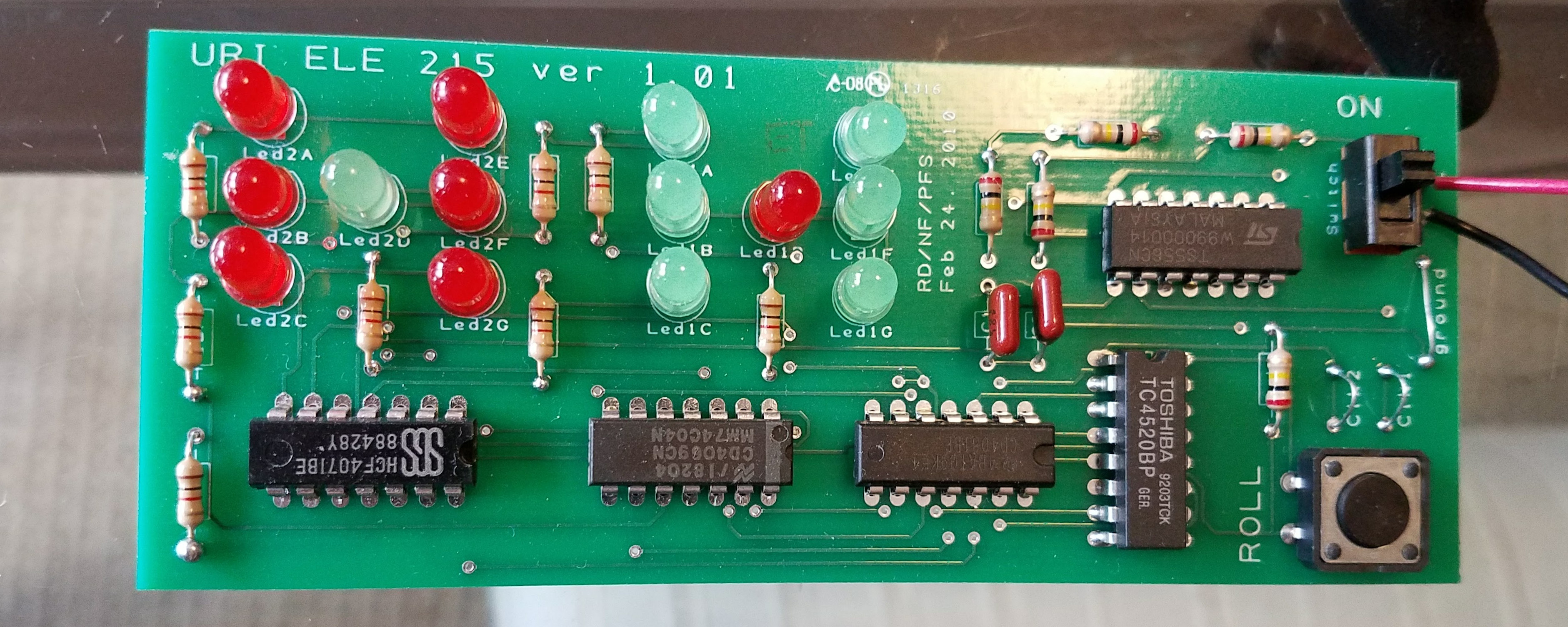
Automatic Dice Roller
Digital Circuit Design, Fall 2017
Using my knowledge of boolean logic and digital circuit design I soldered together a PCB board using LED's, capacitors, integrated circuits and a push button. The push button was debounced using a SR latch. The frequency at which the die on the right changes is 4 times faster than the left making it random when released.
Skills Gained: Understanding of PCB design using Multi-Sim and soldering.